2024.08.13
人間と共存するロボットの未来を拓く、折りたたみ型ロボットハンド
人間の手の繊細な動きを、ロボットで再現する――
それが可能だとしたら、私たちの暮らしはどう変わるだろうか。
新潟工科大学の池田英俊教授が開発する「折りたたみ型ロボットハンド」は、そんな革命的な未来を予感させる。
複雑な機構を省いたデザインでありながら、物をつかみ、つまみ、かきだす。
人間の手の多彩な動きを驚くほど巧みに模倣するこの技術は、人とロボットの共存という夢の実現へ、大きな一歩を踏み出そうとしている。
従来のロボット工学の常識を覆し、新たな可能性を切り拓くこの挑戦を知能ロボット工学界の第一線で研究を進める池田准教授と共に深掘りする。

インタビュイー
池田 英俊氏
新潟工科大学 工学部
准教授
「研究の本質は、他の人と違うアプローチ」の信念が生んだロボットハンド
―――池田教授の研究のきっかけは、何ですか?
私は大学4年次に所属していた研究室での進学を目指して大学院入試を受験しましたが、不合格となりました。しかし、その後、別の分野の研究室で機会を得て、ロボット工学の道に進むことができたのです。
現在、私の専門はロボット工学で、主にロボットハンドの研究に取り組んでいます。この研究に至った経緯には、以前携わっていた介護ロボットの開発が関係しているんです。
介護ロボットの研究では、車椅子利用者を支援するシステムの開発に長く携わりました。具体的には、ロボットと車椅子が協調して段差を乗り越える技術を実現したのです。
私はシステムの大枠を設計し、学生たちが細部の設計や改良を行いました。
この過程で、ロボットハンドの重要性に気づいたのです。
当初は単純な一軸のグリッパーを使用していましたが、より複雑な作業を行うには不十分でした。しかし、自由度を増やすと機構が複雑になり、コストも上昇するという課題がありました。
これらの経験から、ロボットハンドの分野にはまだ多くの課題があると認識し、新しい概念のロボットハンドが必要だと考えるようになったのです。そこで現在、革新的なロボットハンドの研究に取り組んでいます。
この研究を通じて、より高機能かつ効率的なロボットシステムの実現を目指しているんです。
―――池田教授が現在研究されている、折りたたみ型ロボットハンドの基本的な構造と仕組みを教えてください。
私たちが開発している革新的なロボットハンドは、生活支援ロボットの普及を妨げている課題に対する新しいアプローチです。
従来の多指ハンドは、高機能化のために指の数や関節数を増やす傾向にありましたが、それに伴い構造が複雑化し、重量とコストが増大する一方で、作業能力の向上が十分でないという問題がありました。
この課題を解決するため、私たちは人間の手の動きを詳細に観察したのです。
日常生活では、物体を面で把持する動作や少数の指で物体をつまむ動作が多く、必ずしも全ての指を常に動かす必要がないことに着目しました。
この観察結果をもとに、新しい概念のロボットハンドを設計したのです。
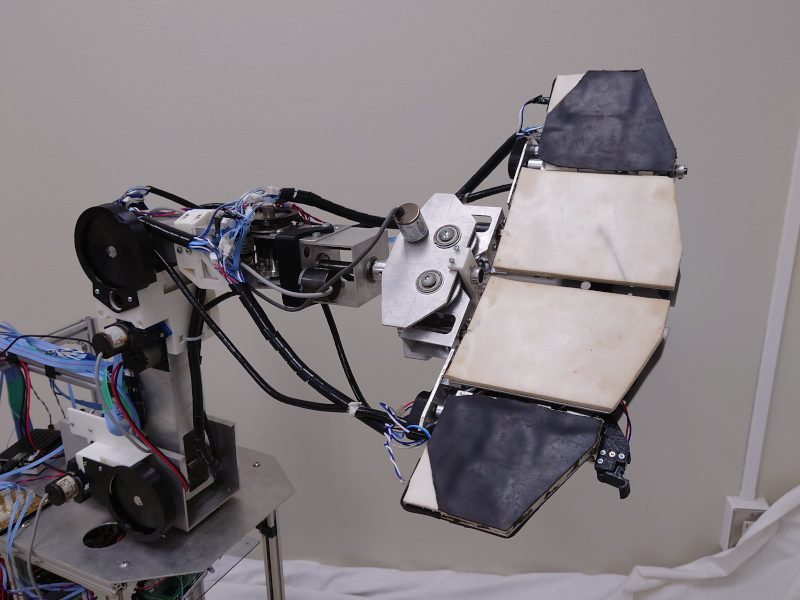
このハンドは、細い指を多数配置する代わりに面状のフィンガーを採用し、それを折りたたんだり人間の手の稼働域を超えた角度に曲げたりすることで、様々な形状に対応できます。
また、6つのモーターで動作する6自由度のシステムを実現し、少ない自由度で多様な動作を可能にしたのです。さらに、指の裏面や側面も積極的に利用することで、把持の安定性を向上させました。
具体的な構造としては、独立対向2輪駆動方式のプラットフォーム上部にマニピュレータ(ロボットアーム)を搭載しています。
このマニピュレータは肩と肘関節にそれぞれ2自由度、ハンドに6自由度を持ち、高い操作性を実現したのです。
ハンド部分は「フィンガ」「フィンガベース」「リスト」から構成され、左右のフィンガは平面状の2リンクで折りたたみ可能な設計になっています。
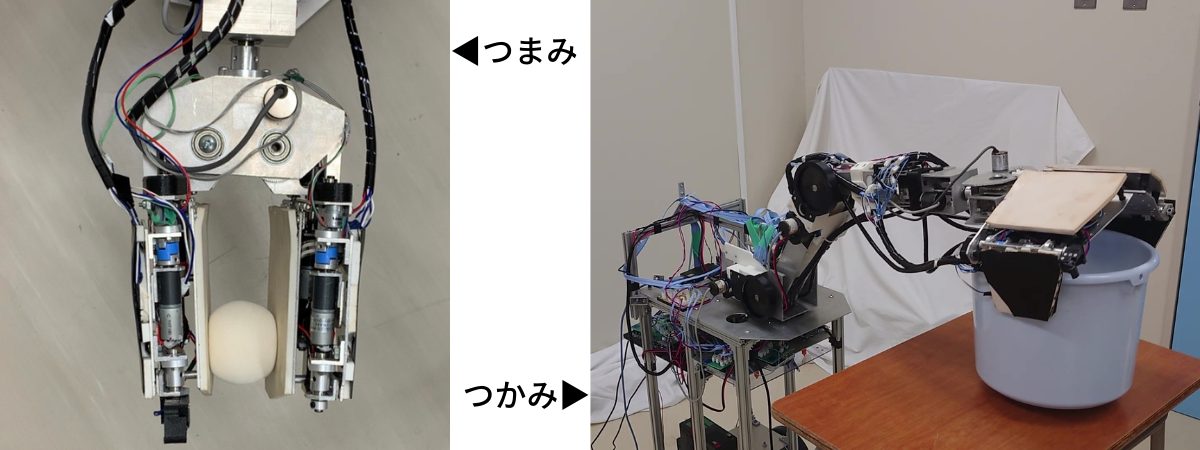
フィンガの開閉と間隔の調整により、つまみやつかみなどの多様な動作を実現できました。
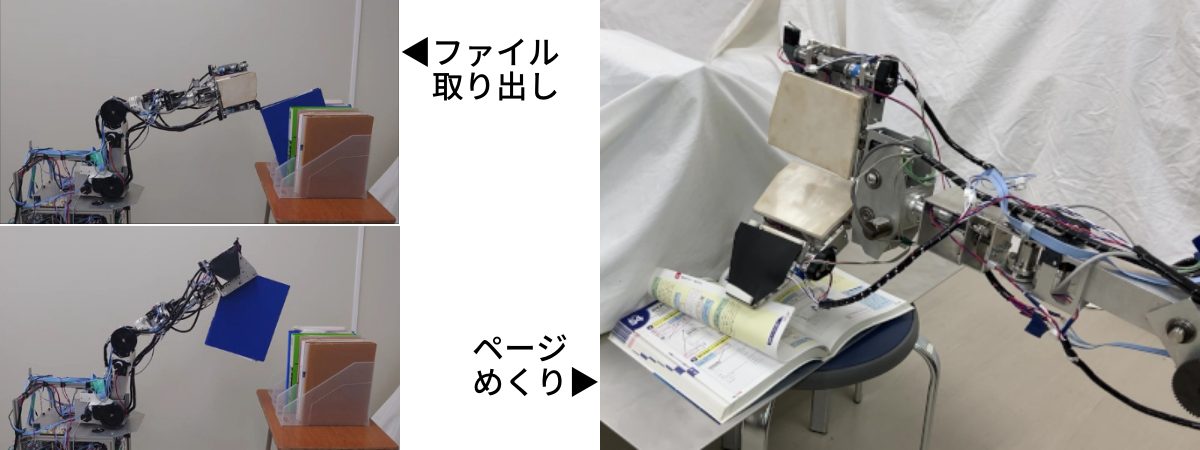
また、ハンドの側面には「爪機構」を搭載し、ファイルや本の取り出しなどの細かい作業にも対応できるようになっているんです。
このアプローチにより、少ない部品数とモーター数で高い機能性を実現し、コストと重量を抑えつつ、多様な作業に対応できるロボットハンドの開発を進めています。 私たちのロボットハンドの研究は、学会や査読の場で様々な反応を引き起こしています。
当初は「また変わったものを作ったね」や「人間の手に似たものが出てくると思っていたのに、全く違うものが出てきた」といった驚きの声が聞かれました。
しかし私は、研究の本質の一つは他人と異なるアプローチを取ることだと信じているんです。
論文を海外の査読者に提出した際、「論文の内容が理解しづらい」といった指摘もありましたが、同時に興味深い反応もありました。
ある査読者からは「物体を把持する戦略を大幅に変えるというアプローチは非常に新しい」というコメントをいただき、私自身もこの研究の新規性を再認識させられたのです。
従来の常識にとらわれず、物体把持の問題に対して全く新しい視点からアプローチすることで、ロボット工学の分野に新たな可能性を提示できると考え、研究に励んでいます。
―――現在の研究の進捗状況はどのようなものですか?
約5〜6年前、私たちは新しいロボットハンドのコンセプトを考案し、基本的なシステム設計を行いました。
その後、研究室の学生たちと共に開発を進め、「つまむ」「つかむ」といった基本的な動作の実現に取り組んできたのです。
「つまむ」動作に関しては、予想以上に複雑な課題に直面しました。
小さな物体をつまむ際、ロボットハンドは変形し、指先が上方に動くのですが、この動きは物体を切るハサミのような状態を生み出します。
結果として、物体がロボットハンドの前方に逃げてしまう現象が発生してしまったのです。
この問題に対し、理論解析と実験を重ね、様々な角度からアプローチを試みました。
試行錯誤の末、ようやくロボットハンドの制御方法を確立し、安定した「つまむ」動作を実現することができたのです。
「つかむ」動作においても同様の挑戦がありました。
例えば、バケツを掴む際には、最初の試行で失敗した後、戦略を変更して成功に至りました。
このプロセスを通じて、ロボットが状況を判断し、アプローチを変更する能力の重要性を認識したのです。
現在、私たちの研究は更に進展し、より複雑な動作の実現に焦点を当てています。
具体的には、ファイルの取り出しや本のページめくりなど、従来の移動ロボットではあまり取り組まれてこなかった課題に挑戦しています。
これらの成果は、現在論文としてまとめている段階です。
解決すべき課題は山積み…未知の領域に挑む!

―――既存のロボットハンドと比較して、折りたたみ型ロボットハンドの優れた点は何ですか?
私たちが開発しているロボットハンドの最大の特徴は、一般的な多指ハンドと比較して、驚くほど少ない自由度で多様な動作を実現できる点です。
自由度とは、ロボットハンドの指を動かすために必要なモーターの数を指します。
現行モデルである初号機では、わずか6自由度で様々なハンドリング作業が可能であることを実証してきました。
人間の手は20以上の自由度を持ち、非常に複雑な動きを実現しています。
しかし、ロボットハンドにおいて人間の手と同等の自由度を実現しようとすると、多数のモーターを内蔵する必要が生じ、設計が複雑になってしまうのです。
また、ワイヤーを引っ張って指を動かす方式でも、細かな制御は困難を伴います。
そこで私たちは、折りたたみ式の構造を採用し、ハンドの形状を変形させることで多様な動作を実現する方法を開発したのです。この方法により、比較的大雑把な制御でも効果的に作業を遂行できることが分かりました。
自由度を大幅に削減できることの最大のメリットは、ロボットハンドの製造コストを大幅に低減できる可能性があることです。
産業用ロボットや介護ロボットなど、実用化を目指す上でコスト削減は極めて重要な課題です。
私たちの開発するロボットハンドは、高機能性を維持しつつ、コスト面で大きな優位性を持つ可能性があります。
―――実際にロボットハンドが応用されている事例があれば、教えてください。
私たちの研究で生まれたロボットハンドは、まだ研究段階にあり、実用化には至っていません。この技術が生まれてから日が浅いため、産業現場や日常生活で即座に活用できる段階ではないのです。
しかし、私たちはこの技術の将来性に大きな期待を寄せており、現在のロボットハンドとしての応用だけでなく、全く異なる分野での活用可能性も見出しています。
例えば、産業機器や移動機器の一部に、折りたたみ式で変形する機構を組み込むことで、新たな機能や効率性を生み出せる可能性があるでしょう。
折りたたみ式で形状を変化させる技術は、ロボットハンドに限らず、様々なメカトロニクス製品に応用できる可能性も秘めています。
現時点では具体的な実用化の道筋は見えていませんが、この技術コンセプトが科学技術の発展に寄与する日が来ると信じています。
―――技術的にまだ解決されていない課題は何ですか?
私たちの研究で扱うロボットハンドは、比較的新しいコンセプトに基づいており、まだ多くの課題が残されています。
私たちの研究チームは、既存のロボットを購入するのではなく、すべてを一から設計・製作しているんです。
これには大きな挑戦が伴いますが、同時に研究の醍醐味でもあります。
例えば、設計図上では問題なく動作するはずの部品が、実際に組み立てると予期せぬ干渉を起こすことがあります。また、前日まで正常に動作していたロボットが突然動かなくなるといったトラブルも珍しくありません。
このような問題は再設計や調整で解決できますが、当初の想定とは異なる結果になることもしばしばです。
しかし、こうした予想外の事態こそが研究の本質であり、新たな発見につながる可能性を秘めています。
現在、私たちは移動ロボットに単一のマニピュレータ(ロボットアーム)を搭載し、様々な可能性を探求しながら問題点を洗い出しています。
今後の課題としては、人間の左右の手のように、2つのアームを協調させて複雑な作業を行う双腕マニピュレータの開発が挙げられるでしょう。
これにより、現在の単腕システムでは困難な作業も可能になる可能性があります。
さらに、同じハンドを搭載した複数のロボットが協力して作業を行う際の課題や可能性の探求も重要です。
ロボット同士が力を及ぼし合う場合の構造的な問題点や、逆に生まれる利点を明らかにすることを目指しています。
この領域はまだ未知の部分が多く、解決すべき課題が山積みです。
―――ロボットハンドの実用化に向けて、どのようなハードルがあると考えていますか?
私たちが開発しているロボットハンドは多指ハンドの一種であり、複数のロボット指で構成されています。
多指ハンドの性能向上を目指す際、一般的にはモーター数や関節数を増やす方向に進みがちです。
しかし、この方法では他の多指ハンドと同様の課題、すなわちコストの上昇、機構の複雑化、制御の困難さといった問題に直面することになります。
私たちの研究の核心は、これらの課題を克服しつつ、高度な作業を実現することです。
具体的には、可能な限り低自由度で簡易な構成を維持しながら、性能を向上させる方法を模索しています。
単純に自由度を増やすのではなく、革新的なアイデアを通じて発生する問題を一つずつクリアしていく必要があるでしょう。
この取り組みは、ロボット工学全体の実用化にも大きな意味を持ちます。
私の恩師が20年以上前から指摘しましたが、ロボットの普及には携帯電話の発展過程から学ぶべき点があります。
携帯電話は、初期段階では品質がやや劣っていても、コストを下げて市場に広く普及させることで、結果的に全体的な生産コストの低減と品質向上を実現しました。
ロボット技術においても同様のアプローチが有効だと考えています。
まず、機能を絞りつつもコストを抑えた製品を市場に投入し、普及させることで生産規模を拡大します。
そうすることで、全体的な生産コストの低減が可能となり、さらなる技術革新と品質向上につながるサイクルを生み出せるでしょう。
社会に広まらなきゃ意味がない!若く柔軟な発想が生み出したコスト削減
―――実用化した後、社会に広まっていくために必要な要素は何だと考えますか?
ロボット工学の分野において、実用化と社会への普及を実現するための最も重要な要素の一つは、コスト削減です。
この認識は、私が以前メーカーの研究所で働いていた経験からも強く感じています。
当時、掃除ロボットの開発に携わり、その実用性に疑問を感じていましたが、20年経った今、掃除ロボットは一般家庭にも広く受け入れられるようになりました。
この経験から、コスト削減の重要性を痛感しています。
私たちの研究室では、高価なセンサを使用せずにタスクを実現することを重視しているんです。
この方針は、最近の研究成果にも表れています。
「本棚からのファイル取り出し」というタスクを、わずか100円程度のスイッチセンサ1つの追加で実現し、その研究論文が海外の論文誌に掲載されました。
この成果の背景には、興味深いエピソードがあります。
以前、高専に勤務していた際、学生にこのテーマを与えたところ、数日後に予想外の解決策を持って来ました。
その学生は、安価なスイッチセンサ1つをロボットに追加し、センサのON/OFF情報のみを使用して、ジグザグに軌道を描きながらファイルを取り出す方法を考案したのです。
通常、ロボット研究では、このような制御に高価な力覚センサやカメラを用いることが少なくありません。
私も最初は、この単純な方法を見て、後でより洗練された方法にやり直させようと考えていました。
しかし、実用化にはコスト意識を持ったシステム構成が重要だという自身の研究理念を思い出し、この斬新なアプローチの価値を認識したのです。
確かに、この方法で動作するロボットは見た目が洗練されているとは言えません。
しかし、安価なセンサでこのような複雑な動作を実現できることは、実用化の観点から非常に大きな成果です。
その後、学生と共にこの方法を様々な角度から検証し、実験とデータ分析を繰り返し行い、最終的に学会発表や論文投稿につなげることができました。
この経験は、若い研究者の柔軟な発想の重要性と、コスト意識を持った研究アプローチの有効性を再認識させてくれました。
高価なセンサーを使えば一時的に高度な機能を実現できるかもしれませんが、それでは生産性や再現性の面で課題が残ります。
私たちの研究室では、今後も実用化を見据えた、コスト効率の高いロボット技術の開発に注力していく所存です。
この姿勢が、将来的にロボット技術の社会への広範な普及につながると確信しています。
―――折りたたみ型ロボットハンドが持つ可能性について、どのように考えていますか?
現在、私たちの研究室では、ギアやリンク機構で構成された従来型のロボットハンドの開発に取り組んでいます。
このハンドは、精密な位置制御や力の伝達が可能であり、多くの産業用途に適しているのです。
しかし、近年、ロボット工学の分野で注目を集めている「ソフトロボット」という新しい領域に、私たちも関心を寄せています。
ソフトロボットは、約20年前から研究が進められている分野で、柔軟な材料を使用して、生物のような柔らかな動きや適応性を持つロボットを作り出すことを目指しているんです。
例えば、シリコーンゴムなどの柔軟な材料を用いて、物体を包み込むように把持したり、繊細な対象物を傷つけることなく扱ったりすることができます。
海洋生物のクラゲを傷つけずに捕獲するロボットハンドなども、ソフトロボットの典型的な応用例です。
私たちは、現在開発中の折りたたみ式ロボットハンドのコンセプトを、ソフトロボットの技術と融合させることで、新たな可能性が開けるのではないかと考えています。
具体的には、硬い機構部品の代わりに柔軟な材料を使用し、材料の変形によって折りたたみや包み込みの動作を実現する方法を模索しているんです。
この融合により、現在のハードな構造のロボットハンドでは対応が難しい用途、例えば非常に繊細な物体の取り扱いや、形状が不定形な対象物の把持などに応用できる可能性があります。
また、ソフトロボットの特性を活かしつつ、必要に応じて硬さを変えられるような、可変剛性を持つハンドの開発も将来的な研究テーマとして考えているんです。
しかし、ソフトロボットの分野は私たちにとってまだ新しく、多くの課題があります。
例えば、柔軟な構造ゆえに精密な位置制御が難しいことや、力の伝達効率が低いことなどが挙げられます。
これらの課題を克服しつつ、ソフトロボットの利点を最大限に活かす方法を見出すことが、今後の研究の焦点となるでしょう。
―――ロボットハンドの他の産業や分野への応用の可能性について教えてください。
私たちが現在開発しているロボットハンドの技術は、当初想定していた用途を超えて、さまざまな分野での応用可能性を秘めています。
現在は主に移動ロボットへの搭載を前提として研究を進めていますが、この技術の特性を活かすことで、全く異なる分野での活用も視野に入れています。
特に注目しているのは、災害救助システムへの応用です。
私たちのロボットハンドは折りたたみ式の特性を持っているため、災害現場での活用が期待できます。
例えば、地震で倒壊した建物の瓦礫の中を探索する際、ハンドを小さく折りたたんで狭い隙間に侵入し、内部で展開して空間を作り出すことができるかもしれません。
これにより、被災者の早期発見や、緊急時の水や食料の供給といった救助活動を効率的に行える可能性があります。
さらに、医療分野での革新的な応用も構想しているんです。
私たちの技術を極小化することで、人体内で使用できる医療機器への応用が考えられます。
例えば、血管内を移動して診断や治療を行う次世代のカテーテルとして利用できるかもしれません。
脳梗塞や心臓疾患などの治療において、従来の方法よりも低侵襲で効果的な手術を可能にする技術として発展させることを目指しているんです。
私たちのロボットハンド技術が、単なる物体把持の枠を超えて、人命救助や先進医療といった、社会的意義の高い分野での活用ができるよう、日々研究を進めています。
諦めずに、最後まで、若い力と切磋琢磨し、社会に良いインパクトを
―――今後挑戦していきたいことや、これからの研究計画について教えてください。
私たちの研究室は、6自由度のハンド機構を持つロボットシステムの開発に成功しました。
このハンド機構は人間の手とは異なる特徴を持ち、関節の可動域が広いため、独特な動きが可能です。
例えば、ほうきとちりとりのような動作で物を拾ったり、お茶碗を片手で持つなど、人間の手では困難な操作を実現できます。
今後は、この特性を活かし、従来にない革新的なハンドリング技術の可能性を追求していく予定です。
次に、新たなロボットシステムの設計・開発を計画しています。
このシステムでは双腕マニピュレータを採用し、より複雑な作業の実現を目指しているんです。
既に、ペットボトルのキャップを開ける実験に成功していますが、双腕化することで新たな課題も生じると予想されます。例えば、力の分散や制御の問題です。
これらの課題に取り組みながら、お皿を両手で扱うなど、より高度な作業の実現を目指します。
最後に、複数のロボットによる協調作業システムの開発を計画しています。
災害現場などの極限環境下では、ロボットが転倒やスタックにより動けなくなることがあるんです。
そのような状況で、他のロボットが協力して転倒したロボットを起こしたり、移動させたりする技術の開発を進めています。
この研究は約7、8年前から取り組んでおり、外部資金も獲得できました。
従来の研究では個々のロボットの移動能力向上に焦点が当てられてきましたが、我々は複数のロボットが互いに助け合うという新しいコンセプトを提案しています。
特に汚染地域などの人間が立ち入りにくい場所では、ロボットが故障しても放置されがちです。
そこで、私たちが開発したハンド機構を活用し、複数のロボットが協力して故障したロボットを救援するシステムの構築を目指しています。
こういった研究を通じて、ロボット技術の新たな可能性を切り開き、極限環境下での作業や災害対応など、社会に貢献できる技術の開発を進めていくことが、今後の研究計画です。
―――日常生活におけるロボットの具体的な活用シナリオを教えてください。
ロボット技術の発展と社会への浸透は段階的に進んでいくと考えられます。
約20年前、私の恩師が予測していたように、まず社会に受け入れられやすいロボットから普及が始まりました。
例えば、掃除ロボットは多少の清掃漏れがあっても許容されやすく、また、ソニーのAIBOのようなペット型ロボットも、転倒して起き上がれなくても愛嬌として受け入れられました。
これらのロボットは、完璧な動作を求められない分野で先行して普及したのです。
現在では、ファミリーレストランなどで活躍する配膳ロボットが登場しており、正確な位置補正や障害物回避など、より高度な技術を要します。
20年前の段階でも各大学で研究されていた技術ですが、実用化には時間がかかりました。
今後は更に難易度の高い作業、例えば力学的な制御を要する皿の運搬や配置、高さの認識、人との接触回避など、複雑な要素を含む作業をこなすロボットの開発が進むでしょう。
次世代のロボットに求められるのは、人間の精神的・肉体的負担を軽減する能力です。
しかし、いきなり高度な自律型ロボットの実現は難しいため、まずは遠隔操作型や装着型など、様々なタイプのロボットが登場すると予想されます。
これらのロボットは、人間がこなしきれない作業や負担の大きい作業を補助する役割を果たすでしょう。
私たちの研究も、この流れに沿って活用されていくと考えています。
―――人間とロボットが共存する未来像について、どのように考えていますか?
ロボット技術の発展において、現在直面している大きな課題の一つは、コストパフォーマンスです。
高度な機能を持つロボットの開発には莫大な費用がかかりますが、その性能が必ずしも投資に見合うものではありません。
例えば、数百万円のロボットを開発しても、現在の技術では期待される機能を十分に発揮できない可能性が高いのです。
この状況は、ロボット研究の国際競争力にも影響を与えています。
約20年前、日本のロボット技術は世界のトップレベルにありましたが、近年は研究予算の削減などにより、他国に追い抜かれつつあります。
特に中国は巨額の投資を行い、論文数でも日本を大きく上回るようになりました。
しかし、予算面で劣勢に立たされている現状では、単純な開発競争ではなく、創意工夫によって差別化を図る必要があります。
私が以前取り組んだ、車いすを支援する介護ロボットの研究はその一例です。
この研究では、ロボットと車いすが協力して段差を乗り越えるシステムを開発しました。
このシステムの特徴は、ロボットが一方的に介護を行うのではなく、人間側も可能な範囲でロボットを支援するという点にあります。
具体的には、車いす利用者が適切なタイミングで停止するだけで、ロボットとの協調動作が可能になります。
この方式により、ロボット単体では実現困難な作業も、人間との協力によって可能になるのです。
このアプローチは、現在のロボット技術の限界を補完する新しい可能性を示しています。
ロボットに全てを任せるのではなく、人間が少しだけロボットを助けることで、より効果的かつ経済的なシステムが実現できる可能性があるのです。
将来的には、現在では予想もできないようなロボットとの共生生活が待っているかもしれません。
しかし、そこに至るまでの道のりは段階的なものになるでしょう。
まずは、コストに見合った作業や人間の支援ができる比較的シンプルなロボットシステムが普及し、徐々に高度化していくと考えられます。
一方で、ロボットの価格設定も重要な課題です。
例えば、500万円のロボットよりも同価格の高級車を選ぶ消費者が多いのが現状です。
掃除ロボットでさえ、同等価格の高性能掃除機を選ぶ人もいます。
つまり、ロボットの機能や利便性が、その価格に見合うものでなければ、一般家庭への普及は難しいのです。
したがって、今後のロボット開発では、高度な技術の追求だけでなく、人間との協調や実用性、そして経済性を考慮したアプローチが重要になってくるでしょう。
―――先生の研究が社会に与えるインパクトについて、どのように予測していますか?
私たちの研究開発の成果が最初に実用化される可能性が高いのは、工業用ロボットの分野だと考えています。特に、組立作業や部品の移動など、製造現場で使用されるロボットへの応用が期待されるでしょう。
現在の工業用ロボットは多数のモーターを使用して動作を制御していますが、我々が開発中のシステムでは、必要なモーターの数を大幅に削減できる可能性があります。
これは、ロボットの自由度を維持しつつ、より効率的な機構を実現することで達成可能です。
モーター数の削減は、ロボットの生産コストを大きく下げる効果があります。
さらに、部品点数が減ることでメンテナンスコストも低減でき、結果として、ロボットを使用する製造ラインの運用コスト全体を抑えることができるでしょう。
このような改善は、単にロボット自体のコスト削減にとどまりません。
製造コストの低減は、生産される製品の価格にも反映されるため、最終的には消費者にもメリットをもたらす可能性があります。
我々の目標は、モーター数を減らすことでコストを抑えつつ、従来以上に高度な作業を可能にするロボットシステムを開発することです。
この技術が工業用ロボットに広く採用されれば、製造業全体の効率化と生産性向上に大きく貢献できると考えています。
現在は、この目標に向けて研究開発を進めている段階です。
自由度を大きく削減しながらも高い機能性を維持できるメカニズムの設計や、効率的な制御方法の開発に取り組んでいます。
将来的に、この技術が工業用ロボットの標準となれば、製造業における革新的な変化をもたらす可能性があるでしょう。
―――最後に、読者の皆様にメッセージをお願いします!
仕事柄、私は多くの学生と一緒に作業する機会があります。
そこで気づいたのは、思っていた以上に優秀な学生が多いということです。
マスコミでは若者の学力低下や意欲の欠如などがしばしば取り上げられますが、実際には非常に能力の高い学生が数多く存在します。
中には、私よりも優秀だと感じる学生もいます。
これは単に学問的な能力だけでなく、人間性の面でも言えることです。
私たち教員よりも優れた資質を持つ学生に出会うことも珍しくありません。
このような状況を目の当たりにすると、私自身も常に緊張感を持って仕事に臨まなければならないと感じます。
表面上は冷静を装っていますが、内心では「こんなに優秀な若者たちに追い越されないよう、全力を尽くさなければ」と自分に言い聞かせています。
彼らの存在が、私にとって大きな刺激となり、自己研鑽の動機づけになっているのです。
若い世代の潜在能力の高さを認識し、それに負けないよう日々努力を重ねています。
この努力の過程で、研究活動の本質についても深く考えさせられます。
研究活動は、しばしば無駄に思えるプロセスの連続であり、将来の成果が見通しにくいものです。私は研究を続ける中で、常にこのことを痛感しています。
しかし、研究を中断してしまえば、そこで全てが終わってしまいます。
そのため、飽きずに、諦めずに、最後まで研究を続けることが重要です。
研究は確かに無駄と失敗の連続ですが、その継続自体に大きな意義があると信じています。
粘り強く研究を推進し続けることで、最終的には社会に良い影響を与えられるよう、社会に貢献できるような成果を目指して、研究活動を推進していく決意です。

ライター
So-gúd編集部
新井 那知
埼玉県・熊谷市出身。渋谷の某ITベンチャーに就職後、2016年にフリーランスライターとして独立。独立後は、アパレル、音楽媒体、求人媒体、専門誌での取材やコラム作成を担当する。海外で実績を積むために訪れたニューヨークで、なぜかカレー屋を開店することに—-帰国後は、クライアントワークを通してライターとして日々取材や編集、執筆を担当する。料理と犬、最近目覚めたカポエイラが好き(足技の特訓中)。
この記事を読んで、あなたは未来を変えたいと思いましたか?
はいいいえ
良かったらその未来をシェアしてくださいね!
はい
0%
いいえ
0%
良かったらその他の記事をご覧ください!
はい
0%
いいえ
0%
クリップボードにコピーしました。