2024.09.24
名古屋大学のロボティクスへの挑戦!ロボットと人間の最適な協調デザインとは?
現代の技術革新により、ロボット技術は急速な進化を遂げている。特に人をアシストするロボットは今後さらに需要が高まることが予測され、さらなる研究や開発への期待が高まっているのが現状だ。
そこで今回は、名古屋大学大学院でロボティクス研究を行う舟洞佑記氏に話を伺い、人間と機械の協調を切り口に、ロボティクス技術の進展におけるさまざまな課題を明らかにし、現状の取り組みや未来への展望を探っていく。
インタビュイー
舟洞 佑記氏
名古屋大学大学院 工学研究科
准教授
ロボティクス技術の進展におけるさまざまな課題
―――まず、研究概要や専門テーマについて教えてください。
「ヒトと共存して未来を拓くロボットシステム」というテーマで、ロボットの計測系、駆動系、システム全体のデザインについて研究しています。
これまでの産業用ロボットは、工場内で人と隔離されて大きな力を出すとか、精度良く制御するとか、人が苦手とするタスクに活用されてきました。ただ、それは実世界の問題のごく一部にしか対応できておりません。さまざまな問題を解決可能にするロボット制御システムを目指し、「ヒトとの共存」をキーワードに広く研究しています。
これまでの「ロボット制御」は、与えられたロボットを与えられた環境でいかに使いこなすかが研究の主眼でした。最近はAIの登場により、多様な環境で活用可能なロボットが広がりつつあります。そのなかで、ロボット自体の構成も含めた、ロボット制御システム全体をデザインしていきたいと考えています。
たとえば、実世界で物や人に作用するロボットを導入する際、どんなロボットを使うべきか、既存の技術で対応できるか、それともこれまでにないアクチュエータが必要かなどを考えます。併せて、環境やタスクに応じてどんなセンサ情報を取得すべきかかも考えます。
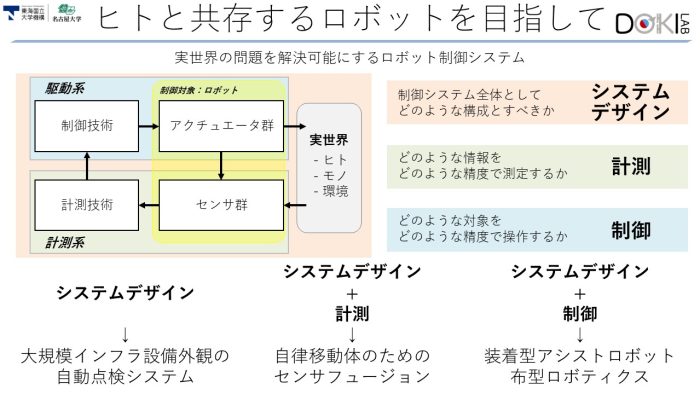
駆動系を構成するアクチュエータや制御技術だけでなく、計測系を構成するセンサや計測技術を含め、システム全体の性能を向上させる要素を明らかにしつつ、計測(どの情報をどの精度で測定するか)、制御(どの対象をどの精度で操作するか)、システムデザインの3つのポイントで研究を進めています。
―――近年の技術革新により、パワードスーツなどが実現しつつあると感じますが、この実現に必要な要素は何だと思いますか?
個々の要素の開発も重要ですし、それらを結合することも重要ですが、一番ネックとなるのはアクチュエータ群です。
モータやモータ制御技術が高度化しているので、分野によっては比較的導入しやすいのですが、人と直接触れ合うとかインタラクションする分野の場合、軽量で安全かつ強力なアクチュエータが必要になるんですね。
そこでソフトロボティクスという分野が出てきてさまざまな研究が進んでいますが、制御システムとしては重量や応答速度などの問題があり、映画に出てくるようなパワードスーツの実現にはまだ課題が残っています。
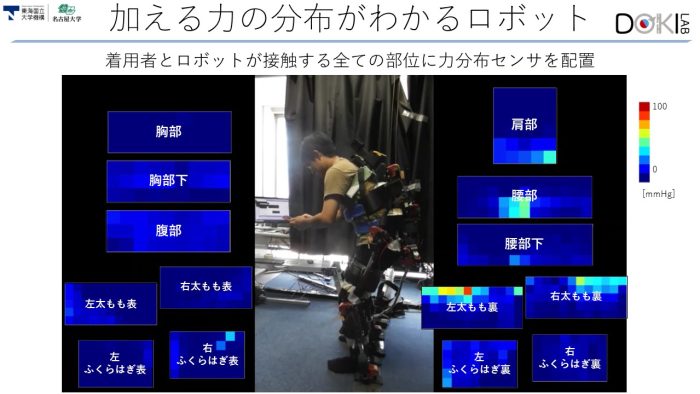
ほかにもセンサ系の課題もあります。人の身体に直接力を加えるにもかかわらず、どの場所にどの程度の力を加えているか解らずに動くロボットは怖いですよね。センサ技術はかなり発達してきているので、計測自体はできつつありますが、情報処理とシステムへの統合が課題となります。
こうした課題を解決し、要素をどうつないでいくのか、これは結構難しいことだと考えています。
―――自動運転技術などのセンサ技術が進化していますが、ロボットやシステムが自ら判断し、人間と協調するためには、どのような課題があるのでしょうか。
そうですね。何だかんだ言っても人間はやっぱり賢くて、限られた情報または大量の情報から必要な情報を短時間でピックアップする能力はすごいと思います。この点に課題を感じております。
自動運転技術でも、LiDAR(Light Detection And Ranging;光検知と測距)をベースに環境を認識して位置を推定する技術がおおむね確立されていて、少しずつ浸透しています。ただ、実際にはデパートのように多くの人がいる状況や、森の中で木々が揺れているような状況になると、途端にその難しさが一気に上がります。
そういった予測しきれない変動をどう捉え、どう判断するのかは非常に難しい。さまざまなセンサ情報をどうやって統合するかという研究はとても重要で、盛んに進められていますし、私もその一端を担っています。
―――自然発生的な風のように予測が難しいものもあれば、車の運転のようにある程度予測可能なものもありますが、予測できることと予測できないことの違いは何でしょうか。
物理的な制約が大きく影響しまして、つまり物理的な法則に従うモデル式を書けるかどうか、モデル式にあてはまるかどうか、なんですね。たとえば、車の挙動は速度やステアリング操作などをもとにモデルを作ることができ、どのような操作でどういう挙動になるかを計算でおおむね予測できます。そういった物理的な拘束が強くて再現性の高い領域であれば数学を使ってモデリングすることができます。しかし、そこには必ず誤差が含まれます。
誤差の影響は大きい場合と小さい場合があり、誤差の要因がいろいろな研究で明らかにされてきたか否か、すなわち、対象をどれくらい理解できているか、によって予測の立てやすさが変わってきます。
センシングにおいても、モデルが重要となるのですが、例えば先のLiDARでは、センシングしたデータのうち、どの部分にどの程度の誤差が含まれるのか、それによって位置の推定にどう影響するのかをモデル化することが難しい。誤差と一言で言っても、実際に何が誤差なのか、それは誤差なのか、どんな要因で生じた誤差なのかを特定するのが難しく、そもそも誤差をどれくらい含む情報なのかが把握しにくい。ですので、物理的な法則が不明確で数式を算出できないようなものはどうしても誤差が大きく、モデル化しにくい領域になります。
最近はそれこそAIのように、大量のデータを収集し、逆にそのデータから法則を見出すアプローチもあります。
今注目なのは、ソフトロボティクスや布型アクチュエータ
―――先生が特に注目している最先端のトレンドや研究成果、事例などはありますか。
おもしろいなと思っているのが、ソフトロボティクスという分野です。この分野には、柔らかい素材を使ってロボットを作る、ロボットと呼ばれるような動きを作り出す、アクチュエータの開発やセンサの設計など、さまざまな要素が含まれます。
従来の硬いロボットは、動きの精度は高いのですが、人に衝突すると危険な場合があります。しかし、柔らかいロボットなら触れても安全ですし、人との密着性を高めて効果を促進する可能性があります。一方で、動きの精密さや再現性が低いなかで、どう活用するかという問題があります。
センサやアクチュエータとしてのソフトロボットは盛んに研究が進められていて、日本では鈴森康一先生(東京工業大学)が新学術領域研究でソフトロボット学の研究分野を開拓され、牽引されております。
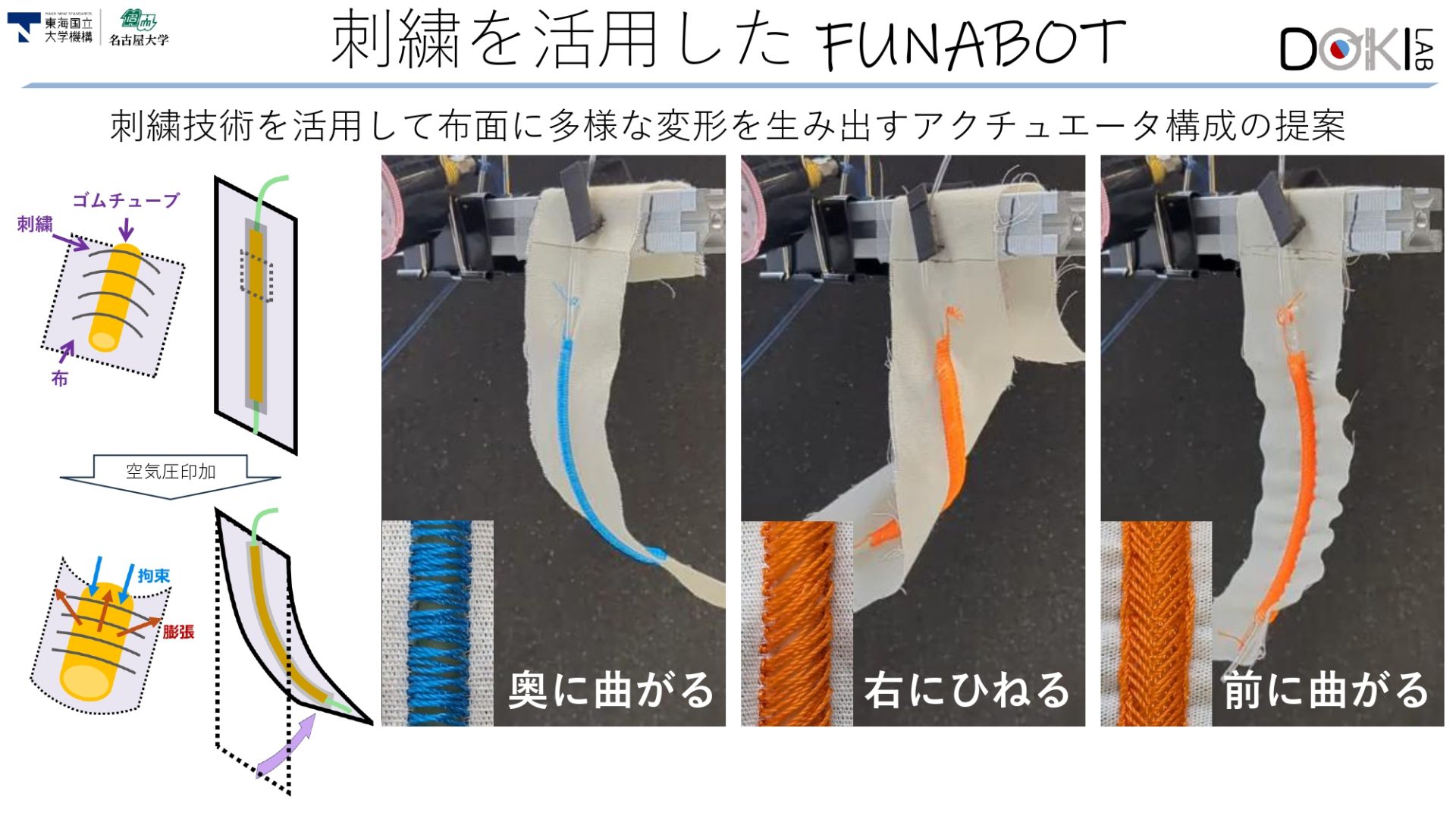
私も、「布型アクチュエータ」という柔らかい布状の筋肉を研究しています。研究室内ではFUNABOT(Fabric-Utilized Natural Actuated roBOT)の愛称で呼ばれ始めました。これは空気で動く糸状の筋肉を布の表面に配置し、布面全体を立体的に動かす技術です。刺繍技術と併せることで、多様な動きを作ることにも成功しております。
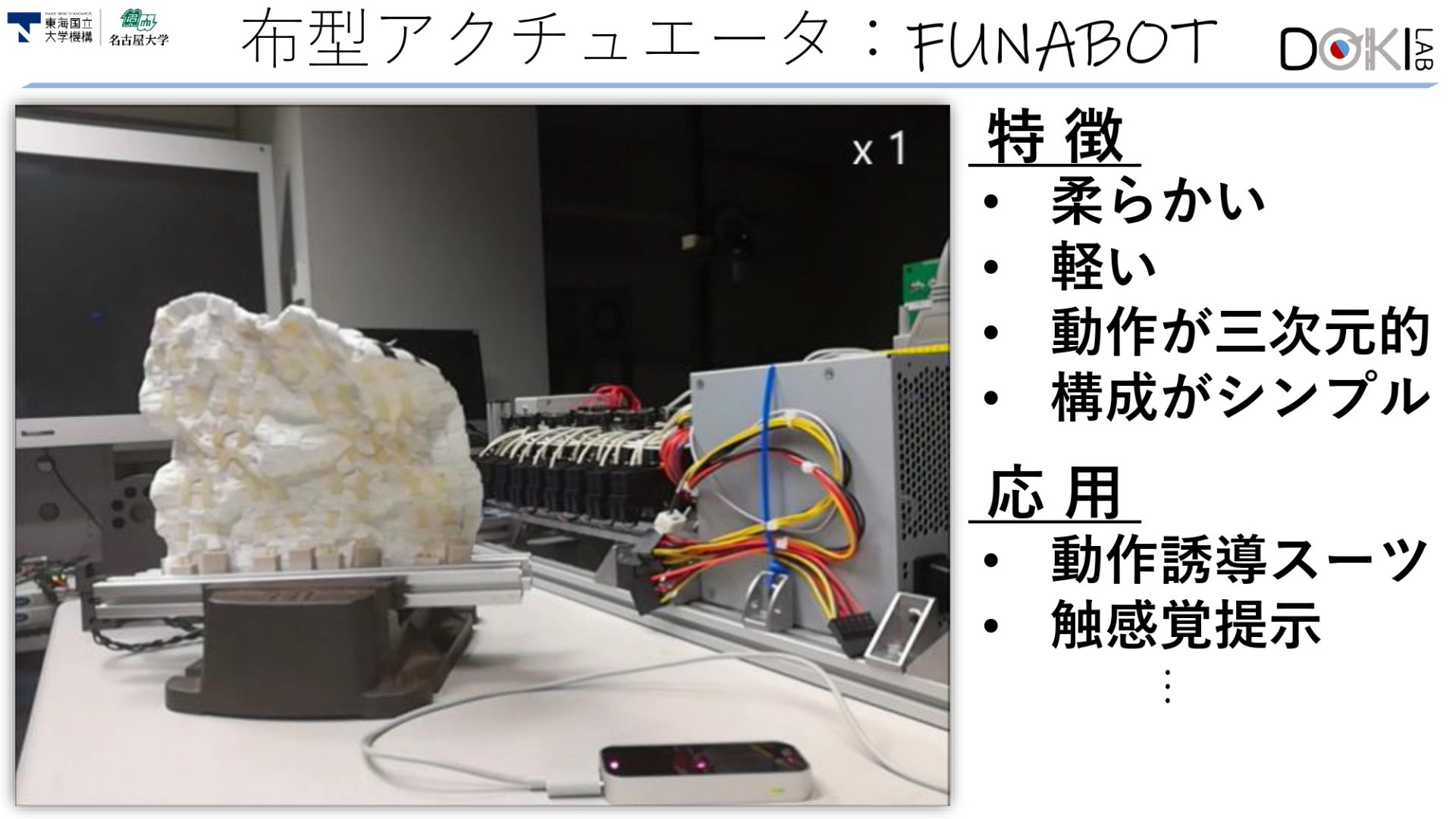
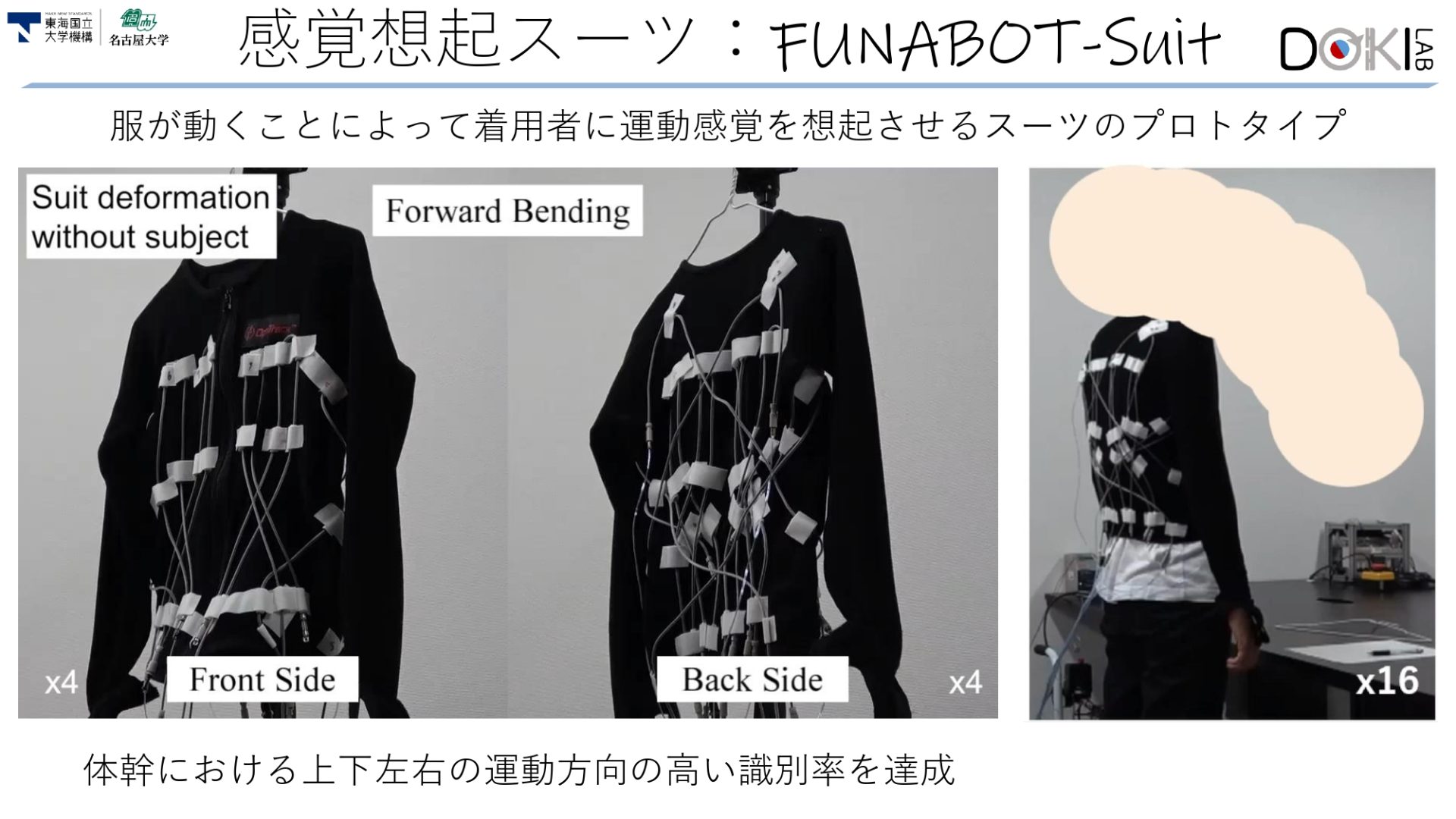
これを利用し、日常的に着用できる軽量でアシスト機能を備えたスーツ作りを目指しています。たとえば、上半身の左右旋回の動作を知覚させて、動作誘導する仕組みなどを検証中です。この技術が発展すれば、アシスト系のスーツなどに応用できると考えています。
技術的な課題に直面しながらではありますが、これまでのロボットとは違う柔らかさを武器にしたロボットが今後実世界で役立つことを願い、この分野に注力しています。
―――この技術が実用化され、一般に普及されるまでおおよそ何年くらいかかると思われますか?
なかなか難しいですね。この技術は空気を圧縮して使用するアクチュエータを使い、複雑な動作を実現させているので、空気を圧縮するためのコンプレッサや圧縮量を調整する制御器を入れなきゃいけない。そうすると装置が重くなるので、日常的に使用するには背負って動くのかという問題が出てきます。
服自体は軽く作れたとしても、周辺の駆動装置が重くなってしまうとなると、病院内や特定のスポーツ、リハビリといった場面で使える可能性もありますが、一般家庭で使うにはまだ技術開発が必要ですね。
―――このような布型の技術研究は、世界的にどれくらい進んでいるのでしょうか。
そうですね、この分野はここ5年くらいで増えてきましたね。2018年ごろは面で動かすことに関してはまだそれほど多くはなく、ごく一部で行われているくらいでしたが、ここ5年くらいで一気に増えた印象ですね。
―――人の生活をアシストするロボットは対話型ロボットやペット型ロボットなどがありますが、デザイン的に日常生活に取り入れる際に違和感を覚える人も多いかもしれません。その違和感を払拭するためには、何が必要だと思われますか。
慣れていないのが要因ではないかと思います。たとえば、ファミレスで配膳ロボットが使われ始めたころは驚かれましたが、徐々に慣れてきたのではないでしょうか。先ほどの布型アクチュエータのデモを行うと、「気持ち悪いね」と言われることがありますが、それは生物らしさを感じてもらえるという意味であり、私としてはある意味褒め言葉だと思っています。
こういった私の研究もそうですが、ロボットを導入できるところから社会に取り入れ、その過程で見た目や動きに対するフィードバックを受けながらロボット研究を進める必要があると感じます。今後、動きの違和感がないロボットが出てくると、より身近に感じてもらえるようになるとは思いますが、やはり慣れが大きいのではないでしょうか。
―――これからソフトロボティクスの領域が大きく発展し、実用化されるシーンも増えてほしいですね。
難しいのは、ハードロボットが産業用として普及している一方で、ソフトロボットは何に使えるのかがまだ明確に示せていないことですね。すなわち、キラーアプリが弱いことですね。それができれば一気に日常生活や人と親和性の高いロボットとして普及すると思うのですが、まだ悩ましい状況です。
ソフトロボティクスの分野としてはこの課題を解決しなければ「単におもしろいね」で終わってしまうので、それをしっかりやらなければと私個人としては考えています。
―――人をアシストするロボットの研究において、どのような課題がボトルネックになっているのでしょうか。
人との親和性を考えたときに、まだアクチュエータが弱いように感じます。
たとえば、空気で動く筋肉はコンプレッサが必要になるため、日常では使いづらい。電気で動くソフトなアクチュエータもありますが、必要な電圧が高く、人が身につけたいと思わない。また、温度で動くアクチュエータもありますが、温度を冷やす必要があるため応答が遅くなる。
このように、人との親和性をブレークスルーするようなアクチュエータがまだないというのが一つのポイントです。こうしたアクチュエータ技術のブレークスルーが起これば、一気に進化すると思います。
『ロボットを介して時空間を超えたい!』未来につながる技術の果てしない挑戦

―――先生が理想とする、人をアシストするロボットはどのようなものでしょうか。
おもしろいと思うのは「意識させないアシスト」です。アシストされていると意識すると、自分でやっていないという感覚がありますよね。しかし、幸せや自己価値を感じる上で、自分でできたという達成感が大事だと思うんです。人間が主体でありながら、ロボットが知らないうちにうまくできるようにしてくれていて、だんだんアシストがなくてもできるようになるというのが理想に近いですね。
たとえば、力が必要なときにロボットがさりげなく力を補助したり、注意を促すべきポイントに自然と誘導したりすることで、人が自分でやり遂げたと感じられるようにする。このように、人が行う行動や判断に対してロボットがさりげなくアシストするという自然な介入を実現したいと考えています。
ただ、このようなシステムは心理学や認知科学など多くの分野の問題が複雑に組み合わさっているので、かなり難しい課題ではありますね。
―――5年後10年後、ロボットは日常生活でどのように活躍していると予想されますか?
装着型のロボットスーツなどは少しずつ市場に出てくると思いますし、リハビリのような日常生活からVRなどの非日常体験まで展開していくのではないでしょうか。自動運転技術も実際にサービスとして提供される段階まで進んでいますし、ロボットが日常生活で活躍することがますます増えていくと予測しています。
ただ、これまではロボットが個々で作用するシステムが多かったのですが、今後はロボット同士が連携した形になるのではないかと思います。何年先に実現するのかはわかりませんが、事業者などにさまざまなロボットが入ってきて、そこから情報を集約し処理して、サービスを向上させるといったシステムになっていくのではないかと考えています。
計測の分野ですと、社会にいろいろなロボットが入ってきて、それぞれがセンサ端末になり、駆動端末にもなる、つまり情報が飛び交う社会の中でロボットは一つの情報収集端末であり発信端末でもあるといったような、新しいサービスや価値を提供する媒体になるのではないかと期待しています。
―――ロボット研究において、夢があれば教えてください。
個人的な野望としては、ロボットを介して時空間超えたいなと思っています。
先ほどの布型アクチュエータの研究のように、ロボットに動きを教えられるということは、過去の人の動きも追体験できるとか、昔の素晴らしい野球選手のバッドの振り方を自分も習得できるとか、時間的な制約や場所的な制約を超えて価値の伝承ができるのではないかと考えています。
先ほどのロボット端末のネットワークの話も、空間的な制約をいかに超えて人々を結びつけるかという話につながってきます。画像や動画、音声などはすでに時空間を超えつつあると思いますが、動きや感覚についてはまだじゅうぶんではない。そういったところも、布の研究の原動力になっています。
―――おもしろいですね。「マトリックス」で能力をインストールするシーンや、「トータル・リコール」で他人の記憶や能力を取り込むシーンを思い出しましたよね・・・SF的なロマンを感じますね!
一緒に研究を行っている先生とも、「未来につながるような技術を作っていきたいね」という話をしています。
―――技術進化やAIの発展が急速に進むなかで、どのように向き合えばよいかわからなかったり、抵抗感を持つ人も多いと思います。その上で、読者にぜひ伝えたいメッセージがあればお聞かせいただけますか?
技術は使ってなんぼだと思いますし、古くから道具を使いこなして人類は進化してきました。そういう意味で、技術を人々が使いこなせるように進化させていくことが大事ですし、人間も技術とともに進化していかなければならないと思います。
たとえば、人に布の研究の話をするときに、布が動いたらどんな未来になるのか、どんなことが可能になるのか問いかけながら話をさせていただくんですね。そういった身近なものがちょっと変わることで、未来に生まれる価値がたくさんあると思うんです。
技術は使う人によって大きく変わりますし、人類全体の可能性を広げるものだと思います。そこをうまく社会と調和させながら、次の未来を築いていける体制が大事です。みなさんの意見を聞きながら研究を進めることも重要ですし、そのための場を作ることも大切だと思います。
研究者だけでなく、みなさんでいろいろな考えを共有しながら未来を築いていけるといいなと思っています。

ライター
So-gúd編集部
新井 那知
埼玉県・熊谷市出身。渋谷の某ITベンチャーに就職後、2016年にフリーランスライターとして独立。独立後は、アパレル、音楽媒体、求人媒体、専門誌での取材やコラム作成を担当する。海外で実績を積むために訪れたニューヨークで、なぜかカレー屋を開店することに—-帰国後は、クライアントワークを通してライターとして日々取材や編集、執筆を担当する。料理と犬、最近目覚めたカポエイラが好き(足技の特訓中)。
この記事を読んで、あなたは未来を変えたいと思いましたか?
はいいいえ
良かったらその未来をシェアしてくださいね!
はい
0%
いいえ
0%
良かったらその他の記事をご覧ください!
はい
0%
いいえ
0%
クリップボードにコピーしました。